14. Intégration du Marine MFD par NMEA 2000
14.1. Introduction à NMEA 2000
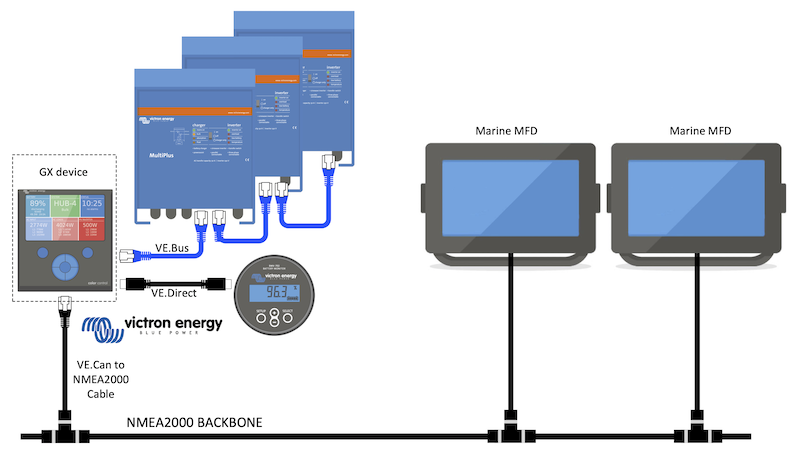
Les dispositifs GX de Victron Energy disposent d’une fonction de sortie NMEA 2000. Lorsqu’elle est activée, le dispositif GX fait office de pont : il rend tous les contrôleurs de batterie, convertisseurs/chargeurs et autres produits connectés au dispositif GX disponibles sur le réseau NMEA 2000.
Grâce à cette fonction, et lorsque le dispositif GX est connecté à un réseau NMEA 2000 2000, les MFD maritimes peuvent lire ces données et les indiquer à l’utilisateur. Avec souvent de nombreuses configurations possibles.
Utilisez notre câble mâle micro-C VE.Can vers NMEA 2000 pour connecter le dispositif GX au réseau NMEA 2000.
Comparaison avec l’intégration de l’application
Par rapport à l’intégration MFD à l’aide de l’application, expliquée dans le chapitre précédent, l’intégration par N2K permet une personnalisation plus poussée de la configuration. L’inconvénient de l’intégration par N2K est que cette configuration demande plus de travail, et vous devez aussi vous assurer que tous les PGN et champs qui s’y trouvent sont pris en charge et compatibles entre le système Victron et le MFD.
Plus d’informations
Outre ce chapitre, assurez-vous de lire également :
Notre principal Guide d’intégration NMEA 2000 et MFD maritime
Le chapitre NMEA 2000 de ce manuel pour le MFD que vous utilisez :
Oui, cela fait beaucoup de lecture, mais c’est fondamentalement inhérent au NMEA 2000 : par exemple, certains de ces MFD prennent en charge l’affichage des données CA reçues via le câblage NMEA 2000, d’autres non. Certains nécessitent la modification des instances de données, d’autres non, et ainsi de suite.
14.2. Appareils / PGN compatibles
NMEA 2000 définit plusieurs messages.
Les messages sont identifiés par leur numéro de groupe de paramètres (PGN).
Une description textuelle du message est disponible sur le site web de NMEA 2000 (http://www.nmea.org/).
Les détails du protocole et la définition des messages ou d’une partie de ceux-ci peuvent être commandés en ligne sur le site de NMEA 2000.
NMEA 2000 est basé sur le protocole SAE J1939 et est compatible avec lui Tous les messages d’information CA sont au format de message d’état CA tel que défini dans la norme J1939-75. Les spécifications de ces messages peuvent être achetées sur le site web de SAE (http://www.sae.org/).
Pour une liste détaillée des PGN, veuillez vous référer à notre livre blanc sur la communication de données avec les produits Victron Energy.
Convertisseurs/chargeurs
Tous les convertisseurs/chargeurs qui se connectent par un port VE.Bus sont pris en charge. Cette catégorie inclut les convertisseurs/chargeurs Multi, Quattro, MultiPlus-II et autres convertisseurs/chargeurs Victron (similaires).
Les données sont transmises et il est possible de régler le courant de quai, d’allumer et d’éteindre le convertisseur/chargeur et d’activer les modes convertisseur uniquement et chargeur uniquement.
L’interface a deux fonctions :
La fonction « 153 Convertisseur » représente la sortie CA
La fonction « 154 entrée CA » représente l’entrée CA
Les messages d’état du chargeur sont envoyés par la fonction convertisseur. Les deux fonctions ont leur propre adresse réseau. Étant donné que les deux fonctions transmettent les mêmes PGN, par exemple un PGN d’état CA contenant la tension, l’intensité et d’autres informations, les consommateurs de données NMEA 2000 tels que les écrans génériques devront être en mesure de les distinguer en fonction de l’adresse réseau. Selon la fonction appartenant à cette adresse réseau, il faudra l’interpréter comme une entrée ou une sortie du convertisseur
Les écrans qui ne peuvent faire cette distinction considéreront les données comme appartenant à l’alimentation secteur (réseau). La sortie du convertisseur est alors interprétée comme réseau n° 0 et l’entrée du convertisseur comme réseau n° 1. Si nécessaire, ces numéros d’instance par défaut peuvent être modifiés par un outil de configuration du réseau.
La température de la batterie, telle que mesurée par le convertisseur (/chargeur), est également transmise.
Toutes les communications VREG doivent être envoyées à l’adresse représentant la fonction convertisseur. L’autre adresse, l’entrée AC, ne prend pas en charge les requêtes VREG : cette adresse transmet uniquement des informations AC relatives à l’entrée AC.
Convertisseurs
Aussi bien la gamme de convertisseurs connectés par VE.Bus que notre gamme de convertisseurs connectés avec un câble VE.Direct sont compatibles, et les informations relatives sont disponibles sur le réseau NMEA 2000.
Contrôleurs de batterie
Compatible. Y compris tous les contrôleurs de batterie pris en charge par le dispositif GX.
La batterie sélectionnée comme batterie système dans le dispositif GX (Paramètres → Configuration du système → Contrôleur de batterie) est transmise avec une instance Appareil et Batterie fixe de 239, ceci pour s’assurer qu’il y a toujours la même instance pour la batterie principale (système) au lieu d’un système utilisant l’instance 0 pour par exemple le Lynx Smart BMS (avec le contrôleur de batterie intégré) et un système avec par exemple un SmartShunt utilisant des instances différentes.
Chargeurs solaires
Compatible. Les valeurs relatives à la batterie ainsi que la tension et le courant des panneaux PV sont disponibles sur le réseau NMEA 2000.
Chargeurs CA
Les modèles 120-240 V et 230 V du chargeur Phoenix Smart IP43 sont pris en charge. Seul le modèle 120-240 V peut être contrôlé à distance (marche/arrêt et limitation du courant d’entrée) depuis un MFD compatible.
Données sur le niveau du réservoir
Tous les niveaux de réservoir visibles sur le dispositif GX, y compris les capteurs GX Tank 140 et Mopeka, sont transmis sur le réseau NMEA 2000. Le PGN utilisé est 127505 Niveau de liquide, qui comprend l’instance de liquide (également appelée instance de données), le type de liquide (carburant, eau douce, eau usée, vivier, huile, eaux noires, essence, diesel, GPL, GNL, huile hydraulique et eau brute), le niveau de liquide en pourcentage de la capacité du réservoir et la capacité du réservoir.
Soyez prudent lorsque vous utilisez les types de liquide GNL, GPL, diesel et huile hydraulique : il s’agit de types relativement nouveaux dans la norme NMEA 2000 et tous les MFD et traceurs de cartes ne les prennent pas encore en charge.
L’étiquetage des réservoirs sur les MFD doit être effectué sur chaque MFD. Le nom personnalisé configuré dans le système Victron est transmis dans le champ Description de l’installation n° 1 dans le PGN 126996 - Informations sur le produit, mais il n’est pas utilisé par les MFD.
Le dispositif GX numérote automatiquement chaque réservoir avec une instance de périphérique et une instance de réservoir uniques. Ils sont identiques. Cette numérotation automatique est effectuée spécifiquement et uniquement pour les niveaux de réservoir afin de simplifier au maximum le processus d’affichage sur toutes les marques et tous les types de MFD.
Autres données et types de produits
Non compatible. Les types mentionnés explicitement ci-dessus sont désormais les seuls pris en charge.
14.3. Configuration NMEA 2000

Paramètre | Par défaut | Description |
|---|---|---|
Profil du CAN-bus | VE.Can | Définit le type et le débit en bauds du réseau CAN-bus. Pour une utilisation en combinaison avec NMEA 2000, veillez à choisir l’un des profils qui incluent VE.Can à une vitesse de 250 kbit/s. |
NMEA 2000-out | Désactivé | Active et désactive la fonction NMEA 2000-out. |
Sélecteur de numéro d’identification unique | 1 | Sélectionne le bloc de numéros à utiliser pour les numéros d’identification uniques NAME dans le champ PGN 60928 NAME. Pour le dispositif GX lui-même, et lorsque la fonction NMEA 2000-out est activée, pour les dispositifs virtuels également. Modifiez-le uniquement lorsque vous installez plusieurs dispositifs GX sur le même réseau VE.Can. Il n’existe aucune autre raison de changer ce numéro. Pour plus d’informations concernant le numéro d’identification unique, consultez la dernière section de ce chapitre. |
Vérifier les numéros d’identification uniques | Recherche d’autres appareils utilisant le même numéro unique. Lorsque la recherche est terminée, il répondra soit par OK, soit par le message suivant : Un autre appareil est connecté avec ce numéro unique. Veuillez en sélectionner un autre. Notez qu’il n’y a normalement aucune raison d’utiliser cette fonction : le dispositif GX vérifie automatiquement et en continu que chacun des numéros utilisés est unique et il vous avertit en cas de conflit. Ce paramètre permet cependant de confirmer rapidement qu’il n’y a pas de problème après avoir modifié le paramètre. |
14.4. Configuration de plusieurs mesures de niveau de réservoir (Raymarine)
Les MFD modernes Raymarine Axiom sont capables d’afficher jusqu’à 16 niveaux de réservoir et les MFD plus petits tels que le i70 ou le i70s peuvent afficher jusqu’à 5 réservoirs.
Les restrictions suivantes s’appliquent :
Actuellement, l’Axiom ne peut afficher que le carburant (par défaut), l’eau douce, les eaux usées (ou eaux grises), le vivier, les eaux noires et l’essence. Les autres types de liquides tels que le GNL, le GPL, l’huile hydraulique et le diesel ne sont pas affichés. Il s’agit d’une limitation propre à Raymarine, qui pourrait changer lors d’une prochaine mise à jour du micrologiciel.
Cependant, il est possible de configurer le type de liquide d’un émetteur de jauge spécifique dans le menu du dispositif GX à l’un des types pris en charge, puis de renommer le réservoir dans les paramètres du réservoir de l’Axiom (Détails du bateau > Configurer les réservoirs > Paramètres du réservoir) à votre convenance, par exemple GPL, qui sera alors affiché comme réservoir GPL sur le tableau de bord.
L’i70 et l’i70s affichent jusqu’à 5 réservoirs où le type de liquide doit être du carburant. Tous les autres types de liquides ne sont pas affichés.
Pour les exigences d’instanciation, voir la section Exigences d’instanciation lors de l’utilisation de Raymarine ci-dessous.
Tous les émetteurs de jauge mentionnés dans les chapitres Connexion des produits Victron et Connexion de produits non Victron pris en charge sont pris en charge.
Configuration pas-à-pas
Avant de passer aux étapes suivantes, vous devez connecter le dispositif GX au réseau NMEA 2000 auquel le MFD est connecté. Utilisez notre câble mâle micro-C VE.Can vers NMEA 2000 pour connecter le dispositif GX au réseau NMEA 2000 et assurez-vous que la sortie NMEA 2000 du port VE.Can est activée sur le dispositif GX.
La procédure ci-dessous ne remplace pas le manuel Raymarine. Veillez à lire la documentation Raymarine qui accompagne votre MFD Raymarine. Consultez le site web des manuels et documents Raymarine pour obtenir la dernière version.
Connectez les capteurs de réservoir à votre dispositif GX.
Assurez-vous que les capteurs de réservoir sont réglés sur un type de liquide pris en charge par votre MFD.


Cette opération s’effectue dans le menu de configuration du capteur de réservoir dans la console à distance - Liste des appareils → [votre_capteur_de_réservoir] → Configuration → Type de liquide.
Sur votre MFD Axiom, accédez à Paramètres > Détails du bateau > Réservoirs > Configurer les réservoirs et vérifiez que tous les capteurs de réservoir sont répertoriés.



Astuce
En appuyant brièvement sur le réservoir concerné, vous pouvez lui attribuer le nom approprié, qui sera ensuite affiché sur le tableau de bord.
Ouvrez le tableau de bord RÉSERVOIRS ou créez une nouvelle page pour afficher les réservoirs.


En appuyant longuement sur l’un des réservoirs, vous pouvez effectuer d’autres réglages, par exemple sélectionner le réservoir à afficher ou, le cas échéant, changer l’unité de pourcentage en unité de volume.
14.5. Configuration de plusieurs mesures de niveau de réservoir (Garmin)
Les MFD modernes de Garmin, tels que la série GPSMAP 84xx, sont capables d’afficher différents types de niveaux de réservoir.
Les restrictions suivantes s’appliquent :
Actuellement, le GPSMAP ne peut afficher que le carburant (par défaut), l’eau douce, les eaux usées (ou eaux grises), le vivier, les eaux noires et le liquide de générateur. Les autres types de liquides tels que le GNL, le GPL et le diesel ne sont pas affichés. Il s’agit d’une limitation propre à Garmin, qui pourrait changer avec les prochaines mises à jour du micrologiciel de votre MFD.
Cependant, il est possible de configurer le type de liquide d’un émetteur de jauge spécifique dans le menu du dispositif GX à l’un des types pris en charge, puis de renommer le réservoir dans les paramètres du réservoir du GPSMAP à votre convenance, par exemple GPL, qui sera alors affiché comme réservoir GPL sur le tableau de bord.
Tous les émetteurs de jauge mentionnés dans les chapitres Connexion des produits Victron et Connexion de produits non Victron pris en charge sont pris en charge.
Configuration pas-à-pas
Avant de passer aux étapes suivantes, vous devez connecter le dispositif GX au réseau NMEA 2000 auquel le MFD est connecté. Utilisez notre câble mâle micro-C VE.Can vers NMEA 2000 pour connecter le dispositif GX au réseau NMEA 2000 et assurez-vous que la sortie NMEA 2000 du port VE.Can est activée sur le dispositif GX.
La procédure ci-dessous ne remplace pas le manuel Garmin. Veillez à lire la documentation Garmin qui accompagne votre MFD ; il existe des différences de navigation des menus entre les différents MFD.
Connectez les capteurs de réservoir à votre dispositif GX.
Assurez-vous que les capteurs de réservoir sont réglés sur un type de liquide pris en charge par votre MFD.
Cette opération s’effectue dans le menu de configuration du capteur de réservoir dans la console à distance - Liste des appareils → [votre_capteur_de_réservoir] → Configuration → Type de liquide.
Sur votre MFD Garmin, accédez à Paramètres > Communications > Configuration NMEA 2000 > Liste des appareils et vérifiez que tous les capteurs de réservoir sont répertoriés.


Configurez les capteurs de niveau de réservoir en ouvrant un écran de jauges, puis en sélectionnant Menu > Préréglage de réservoir où vous pourrez sélectionner un capteur de niveau de réservoir à configurer, modifier le nom, le type, le style, la capacité et la position du réservoir.


14.6. Configuration de plusieurs mesures de niveau de réservoir (Navico)
Les MFD modernes de Navico, tels que la série Simrad NSO EVO3, sont capables d’afficher différents types de niveaux de réservoir.
Les restrictions suivantes s’appliquent :
Actuellement, un MFD Simrad compatible ne peut afficher que les types de liquides suivants : carburant (par défaut), eau, eaux usées (ou eaux grises), vivier, huile et eaux noires. Les autres types de liquides tels que le GNL, le GPL et le diesel ne sont pas affichés. Il s’agit d’une limitation propre à Simrad, qui pourrait changer avec les prochaines mises à jour du micrologiciel de votre MFD.
Cependant, il est possible de configurer le type de liquide d’un émetteur de jauge spécifique dans le menu du dispositif GX à l’un des types pris en charge, puis de renommer le réservoir dans les paramètres du réservoir du MFD à votre convenance, par exemple GPL, qui sera alors affiché comme réservoir GPL sur le tableau de bord.
Tous les émetteurs de jauge mentionnés dans les chapitres Connexion des produits Victron et Connexion de produits non Victron pris en charge sont pris en charge.
Configuration pas-à-pas
Avant de passer aux étapes suivantes, vous devez connecter le dispositif GX au réseau NMEA 2000 auquel le MFD est connecté. Utilisez notre câble mâle micro-C VE.Can vers NMEA 2000 pour connecter le dispositif GX au réseau NMEA 2000 et assurez-vous que la sortie NMEA 2000 du port VE.Can est activée sur le dispositif GX.
La procédure ci-dessous ne remplace pas le manuel Simrad. Veillez à lire la documentation Simrad qui accompagne votre MFD ; il existe des différences de navigation des menus entre les différents MFD.
Connectez les capteurs de réservoir à votre dispositif GX.
Assurez-vous que les capteurs de réservoir sont réglés sur un type de liquide pris en charge par votre MFD.
Cette opération s’effectue dans le menu de configuration du capteur de réservoir dans la console à distance - Liste des appareils → [votre_capteur_de_réservoir] → Configuration → Type de liquide.
Sur votre Simrad MFD, accédez à Paramètres > Réseau > Sources > Avancé > Sélection de la source de données et vérifiez que tous les capteurs de réservoir sont répertoriés. Les capteurs de réservoir devraient être automatiquement identifiés par le système. Si ce n’est pas le cas, activez la fonction à partir des options avancées dans la boîte de dialogue Paramètres système.


La sélection d’un capteur de réservoir dans le menu de sélection de la source de données permet d’obtenir des détails supplémentaires et des options de configuration telles que le type de liquide, l’emplacement ou la personnalisation du nom. Enfin, ouvrez un tableau de bord ou créez un tableau de bord personnalisé et disposez les capteurs de réservoir comme vous le souhaitez.


14.7. Configuration de plusieurs mesures de niveau de réservoir (Furuno)
Les MFD modernes de Furuno, tels que la série NavNet TZtouch3, sont capables d’afficher différents types de niveaux de réservoir.
Les restrictions suivantes s’appliquent :
Actuellement, la série NavNet TZtouch3 ne peut afficher que le carburant (par défaut), l’eau douce et les eaux noires avec jusqu’à 6 réservoirs pour chacun des trois types de liquide.
Cependant, il est possible de modifier le « surnom » de chaque réservoir individuel dans le menu Configuration manuelle du moteur et des réservoirs.
Tous les émetteurs de jauge mentionnés dans les chapitres Connexion des produits Victron et Connexion de produits non Victron pris en charge sont pris en charge.
Configuration pas-à-pas
Avant de passer aux étapes suivantes, vous devez connecter le dispositif GX au réseau NMEA 2000 auquel le MFD est connecté. Utilisez notre câble mâle micro-C VE.Can vers NMEA 2000 pour connecter le dispositif GX au réseau NMEA 2000 et assurez-vous que la sortie NMEA 2000 du port VE.Can est activée sur le dispositif GX.
La procédure ci-dessous ne remplace pas le manuel Furono. Veillez à lire la documentation Furono qui accompagne votre MFD ; il existe des différences de navigation des menus entre les différents MFD.
Connectez les capteurs de réservoir à votre dispositif GX.
Assurez-vous que les capteurs de réservoir sont réglés sur un type de liquide pris en charge par votre MFD.
Cette opération s’effectue dans le menu de configuration du capteur de réservoir dans la console à distance - Liste des appareils → [votre_capteur_de_réservoir] → Configuration → Type de liquide.
Le MFD Furuno détectera automatiquement les réservoirs connectés au même réseau NMEA 2000. Si cela n’est pas possible (voir le menu Configuration automatique du moteur et des réservoirs), les réservoirs peuvent être réglés manuellement à partir du menu Configuration manuelle du moteur et des réservoirs.
Configurez un « écran d’instruments » de votre choix et ajoutez les réservoirs respectifs en tant qu’« indication » (comme décrit dans le manuel de l’opérateur) à l’écran d’instruments.
14.8. Détails techniques NMEA 2000-out
14.8.1. Glossaire NMEA 2000
Le glossaire ci-dessous vous aidera à interpréter ce texte.
Périphérique virtuel : un contrôleur de batterie, un convertisseur ou un autre périphérique Victron qui n’a pas de port de CAN-bus lui-même, mais rendu disponible « virtuellement » sur le CAN-bus par la fonction NMEA 2000-out du dispositif GX.
CAN-bus : port VE.Can sur le dispositif GX qui, dans le contexte de ce chapitre, est très probablement connecté à un réseau NMEA 2000.
Fonction NMEA 2000-out : fonction logicielle du dispositif GX décrite dans ce chapitre.
NMEA 2000 : protocole CAN-bus maritime basé sur J1939.
Instance : il existe de nombreux types d’instances, détaillés ci-dessous.
J1939 : série de normes définissant un protocole CAN-bus, définies par l’organisation SAE.
Procédure de demande d’adresse (ACL) : mécanisme spécifié par J1939 et utilisé dans NMEA 2000 par les appareils du réseau pour négocier et attribuer à chacun d’entre eux une adresse réseau unique. Il s’agit d’un nombre compris entre 0 et 252. Trois adresses réseau spéciales sont définies :
0xFD (253) - Réservée
0xFE (254) - Impossible de demander une adresse (par exemple lorsque toutes les autres sont utilisées)
0xFF (255) - L’adresse de diffusion
14.8.2. Périphériques virtuels NMEA 2000
Lorsque la fonction NMEA 2000-out est activée, le dispositif GX fait office de pont : il rend chaque contrôleur de batterie, convertisseur/chargeur ou autre appareil connecté disponible individuellement sur le bus CAN. Individuellement, chacun avec sa propre adresse réseau, sa propre instance de périphérique, ses propres codes de fonction, etc.
Par exemple, avec un dispositif GX avec deux BMV connectés sur un port VE.Direct et un convertisseur/chargeur connecté via VE.Bus, les données suivantes seront disponibles sur le CAN-bus :
Adresse | Catégorie | Fonction | Description |
|---|---|---|---|
0xE1 | 130 (Écran) | 120 (Écran) | Le dispositif GX lui-même |
0x03 | 35 (Production d’électricité) | 170 (Batterie) | Le 1er BMV |
0xE4 | 35 (Production d’électricité) | 170 (Batterie) | Le 2e BMV |
0xD3 | 35 (Production d’électricité) | 153 | Le convertisseur/chargeur (sortie CA) |
0xD6 | 35 (Production d’électricité) | 154 | Le convertisseur/chargeur (entrée CA) |
14.8.3. Classes et fonctions NMEA 2000
Conformément à la spécification NMEA 2000, les classes et les fonctions définissent les types d’émetteurs et d’appareils connectés au CAN-bus. Les classes correspondent aux catégories générales et les fonctions les précisent de manière plus détaillée.
14.8.4. Instances NMEA 2000
Les instances sont utilisées dans un réseau NMEA 2000 pour identifier plusieurs produits similaires connectés au même réseau.
À titre d’exemple, prenons un système comportant deux contrôleurs de batterie (un pour le parc de batteries principal et un autre pour le parc de batteries du propulseur hydraulique) ainsi qu’un convertisseur/chargeur Quattro. Ces trois appareils enverront leurs mesures de tension de batterie sur le réseau N2K. Pour que les écrans affichent ces valeurs au bon endroit, ils doivent savoir quelle tension correspond à quelle batterie. C’est à cela que servent les instances.
Il existe différents types d’instances et, pour les systèmes maritimes, deux d’entre eux sont importants : l’instance de périphérique et l’instance de données. L’instance de données porte différents noms, comme instance de liquide, instance de batterie et instance CC. NMEA 2000 définit trois instances différentes :
Instance de données
Instance de périphérique
Instance de système
Pour tous les contrôleurs de batterie et autres appareils que le dispositif GX met à disposition sur le CAN-bus, chacun des types d’instances ci-dessus est disponible et peut être configuré individuellement.
Par périphérique virtuel, il y a une seule instance de périphérique et une seule instance de système. Et en fonction du type de périphérique virtuel, il existe une ou plusieurs instances de données.
Par exemple, pour un BMV-712, il existe deux instances de données, une « instance DC » pour la batterie principale et une autre pour la tension de la batterie de démarrage.
La modification et l’utilisation des instances dépendent de l’équipement et du logiciel utilisés pour les lire à partir du CAN-bus. Exemples d’équipements et de logiciels utilisés ici : les MFD de Garmin, Raymarine, Furuno ou Navico, ainsi que les solutions plus orientées logiciel, comme celle d’Actisense et de Maretron.
La plupart de ces solutions identifient les paramètres et les produits en demandant des instances de périphérique uniques, ou en utilisant le PGN 60928 NAME Numéro d’identification unique et ne s’appuient pas sur des instances de données globalement uniques.
Il existe toutefois quelques exceptions :
Les MFD Raymarine peuvent avoir besoin de modifier l’instance de données pour afficher les données correctement, en fonction de la version du micrologiciel Lighthouse. Pour plus d’informations, veuillez consulter le chapitre spécifique à Raymarine NMEA 2000.
La norme NMEA 2000 stipule ce qui suit : « Les instances de données doivent être uniques dans les mêmes PGN transmis par un appareil. Les instances de données ne doivent pas être globalement uniques sur le réseau. La programmation des champs doit être mise en œuvre au moyen du PGN 126208, Fonction de groupe d’écriture des champs ».
Autrement dit, les instances de données doivent être uniques seulement au sein d’un même appareil. Elles ne doivent pas être uniques pour l’ensemble du réseau. La seule exception est «l’instance de moteur » qui, au moins pour l’instant, doit être unique sur l’ensemble du réseau (par exemple, bâbord = 0, tribord = 1). Par exemple, certains de nos contrôleurs de batterie BMV peuvent mesurer deux tensions, une pour la batterie principale et une pour la batterie de démarrage, et c’est là que l’instanciation des données est utilisée. C’est la même chose pour les chargeurs de batterie à plusieurs sorties. Notez qu’il n’est pas nécessaire que l’installateur modifie ces instances de données, car ces produits sont préconfigurés pour transmettre les PGN pertinents avec des instances de données uniques (dans ce cas, instance de batterie et instance DC détaillée).
Avertissement
Bien qu’il soit possible de modifier les instances de données, leur modification sur un appareil Victron, tel qu’un chargeur de batterie Skylla-i, rendra cet appareil impossible à lire correctement par les autres appareils Victron.
En effet, le dispositif GX s’attend à ce que la sortie 1 du chargeur soit sur l’instance de batterie et CC 0, la sortie 2 sur l’instance de batterie et CC 1 et la sortie 3 sur l’instance de batterie et CC 2. La modification de l’instance de liquide, ainsi que d’autres instances de données pour les PGN transmis par un dispositif GX sur un réseau NMEA 2000 à l’aide de sa fonction NMEA2000-out, ne pose aucun problème.
Remarque sur les instances de périphérique : il n’est pas nécessaire d’attribuer une instance de périphérique unique à chaque périphérique sur le CAN-bus. Ce n’est absolument pas un problème si un contrôleur de batterie et un chargeur solaire sont tous deux configurés avec (par défaut) l’instance de périphérique 0. De même, lorsque vous avez plusieurs contrôleurs de batterie ou chargeurs solaires, il n’est pas toujours nécessaire d’affecter à chacun d’eux une instance de périphérique unique. Il est seulement nécessaire d’éviter les doublons entre les appareils qui utilisent la même fonction.
Notez aussi que la modification de l’instance de périphérique sur un appareil Victron peut modifier son fonctionnement (voir l’avertissement ci-dessus).
Instances de système
Conformément à la norme NMEA 2000, cette instance est un champ de 4 bits avec une plage valide comprise entre 0 et 15 et qui indique la présence d’appareils dans des segments de réseau supplémentaires, des réseaux redondants ou parallèles, ou des sous-réseaux.
Le champ « instance de système » peut être utilisé pour faciliter la mise en place de plusieurs réseaux NMEA 2000 sur ces plateformes maritimes de plus grande taille. Les appareils NMEA 2000 situés derrière un pont, un routeur ou une passerelle, ou faisant partie d’un segment de réseau, peuvent tous l’indiquer par utilisation et application du champ instance de système.
L’instance ECU et l’instance de fonction
Certains documents et logiciels emploient une autre terminologie :
Instance ECU
Instance de fonction
Instance de périphérique inférieure
Instance de périphérique supérieure
Voici le rapport entre tous ces termes : instance ECU et instance de fonction proviennent des spécifications SAE J1939 et ISO 11783-5. Ils n’existent pas dans la définition de NMEA 2000. Cependant, ils définissent tous les mêmes champs dans les mêmes messages CAN-bus que NMEA 2000 définit comme instances de périphérique.
Plus en détail : le champ que J1939 définit comme instance ECU porte dans la norme NMEA 2000 le nom d’instance de périphérique inférieure. L’instance de fonction est renommée instance de périphérique supérieure. Et ensemble elles forment l’instance de périphérique, une définition de NMEA 2000.
Bien qu’ils utilisent des termes différents, ces champs sont identiques dans les deux normes. Si l’instance de périphérique inférieure a une longueur de 3 bits et l’instance de périphérique supérieure a une longueur de 5 bits, elles totalisent 8 bits. L’octet correspondant à l’instance de périphérique NMEA 2000.
L’instance unique
L’instance unique est un autre terme utilisé pour décrire une information très similaire. Ce paramètre est utilisé par Maretron et il suffit d’activer la colonne dans son logiciel pour le rendre visible. Le logiciel Maretron lui-même choisit entre instance de périphérique et instance de données.
14.8.5. Modification des instances NMEA 2000
Comme le protocole NMEA 2000 prescrit des commandes pour modifier une instance en envoyant des commandes à un appareil, il existe plusieurs façons de modifier les instances. Les méthodes les plus couramment utilisées sont décrites ci-dessous. Outre les méthodes décrites ici, il en existe d’autres ; par exemple, certains MFD permettent également de modifier les instances.
Méthodes couramment utilisées pour modifier les instances :
Console à distance sur un dispositif GX : Instances de périphérique uniquement
Logiciel Actisense NMEA Reader + NGT-1 USB : Instances de périphérique et de données
Logiciel Maretron + adaptateur USB : Inconnu (voir la documentation Maretron)
Ligne de commande d’un dispositif GX : Instances de périphérique et de données Notez que cette opération nécessite des compétences Linux avancées et qu’elle n’est mentionnée ici qu’à l’intention des développeurs de logiciels expérimentés.
Remarques sur la modification des instances de données et de périphériques
Instance de données :
Même si nous recommandons de ne pas modifier les instances de données (voir l’explication et l’AVERTISSEMENT ci-dessus), il est possible de les modifier.
Venus OS n’a pas la possibilité de les modifier - un outil tiers est nécessaire et le seul outil que nous connaissons est le logiciel Actisense NMEA Reader.
Instance de périphérique :
AVERTISSEMENT : ces fonctionnalités (Victron) dépendent de l’instance de périphérique :
Pour un système ESS avec des chargeurs solaires connectés à un réseau VE.Can, ces chargeurs solaires doivent rester configurés sur leur instance de périphérique par défaut (0) pour fonctionner correctement. Cette condition ne s’applique pas aux chargeurs solaires VE.Direct disponibles sur le CAN-bus en tant que périphériques virtuels, à l’aide de la fonction NMEA 2000-out. Sauf si l’instance de périphérique du dispositif GX est reconfigurée en une autre instance de périphérique. C’est techniquement possible, mais déconseillé et nécessaire en aucun cas. Mais dans cette situation, les chargeurs doivent être configurés sur la même instance que le dispositif GX.
Pour les systèmes avec batteries gérées, c’est la même chose.
Lorsqu’ils sont connectés à un réseau VE.Can, les chargeurs solaires et les chargeurs de batterie connectés en courant alternatif synchronisent leur fonctionnement, leur état de charge, etc. Pour que cette fonction soit disponible, tous les chargeurs doivent être configurés sur la même instance de périphérique.
En résumé, pour la plupart des systèmes, nous recommandons de laisser l’instance de périphérique à sa valeur par défaut, à savoir 0.
Console à distance sur un dispositif GX : Modification de l’instance de périphérique :
Le sous-menu des périphériques VE.Can donne accès à une liste qui indique tous les périphériques détectés sur le réseau VE.Can/NMEA 2000 :

Chaque entrée indique en premier le nom : le nom du produit figurant dans notre base de données, ou lorsqu’il est configuré, le nom personnalisé configuré durant l’installation.
Puis, entre les crochets, le numéro unique d’identité est affiché.
Sur la droite, vous pouvez voir l’instance de périphérique VE.Can, qui est identique à l’instance de périphérique NMEA 2000.
Appuyez sur Entrée pour modifier l’instance de périphérique spécifique ou appuyez sur la barre espace/le curseur de droite pour aller plus loin dans la structure du menu jusqu’à la page qui affiche toutes les données génériques disponibles pour ce périphérique :

Actisense : Modification des instances de périphérique :
Nécessite l’Actisense NGT-1.
Pour modifier une instance de périphérique :
Ouvrez le logiciel Actisense NMEA Reader
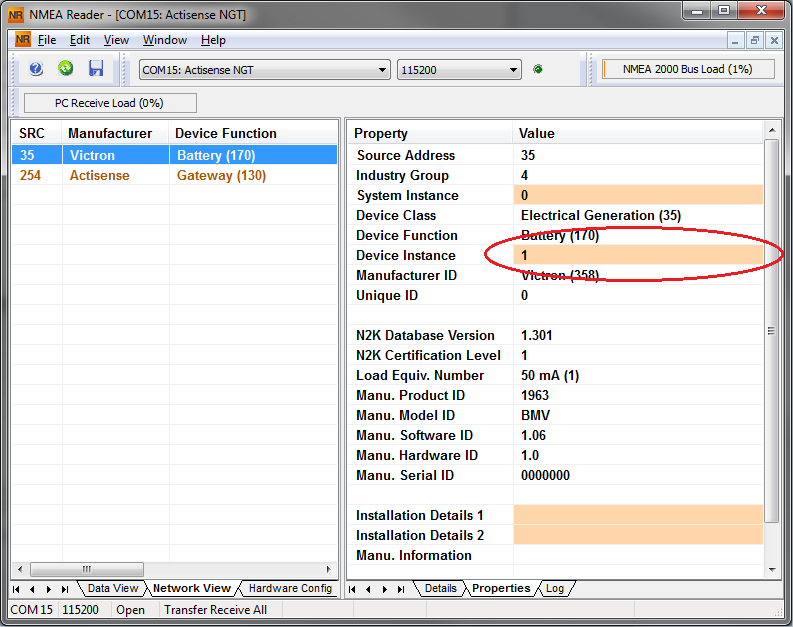
Sélectionnez la vue Réseau (l’onglet de sélection se trouve en bas à gauche)
Sélectionnez le produit dont vous souhaitez modifier l’instance de périphérique
Sélectionnez l’onglet « Propriétés » en bas à droite et modifiez l’instance de périphérique
Actisense : Modification des instances de données :
Nécessite l’Actisense NGT-1.
Pour modifier une instance de données :
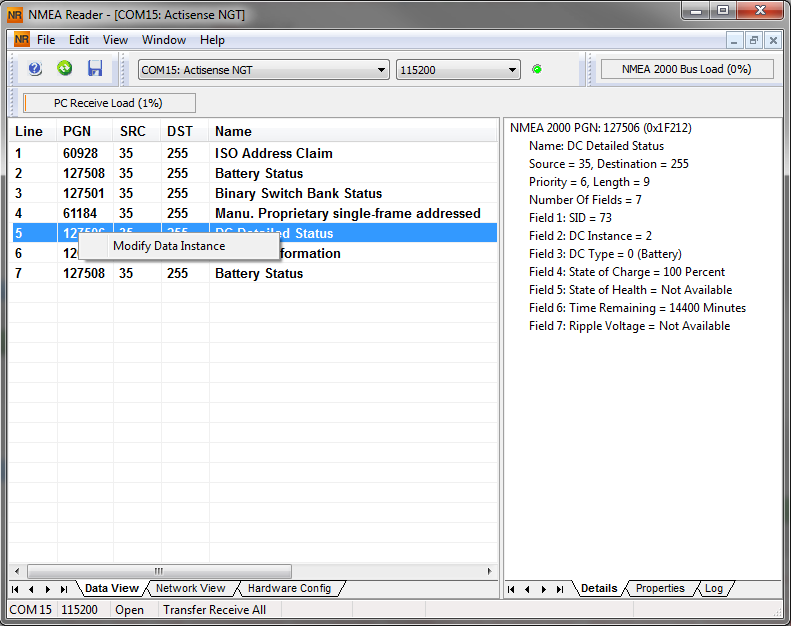
Ouvrez le logiciel Actisense NMEA Reader
Sélectionnez la vue Données (l’onglet de sélection se trouve en bas à gauche)
Cliquez avec le bouton droit sur le numéro PGN
Notez que cela ne fonctionnera que pour les PGN qui permettent de modifier leur instance de données (première capture d’écran ci-dessous)
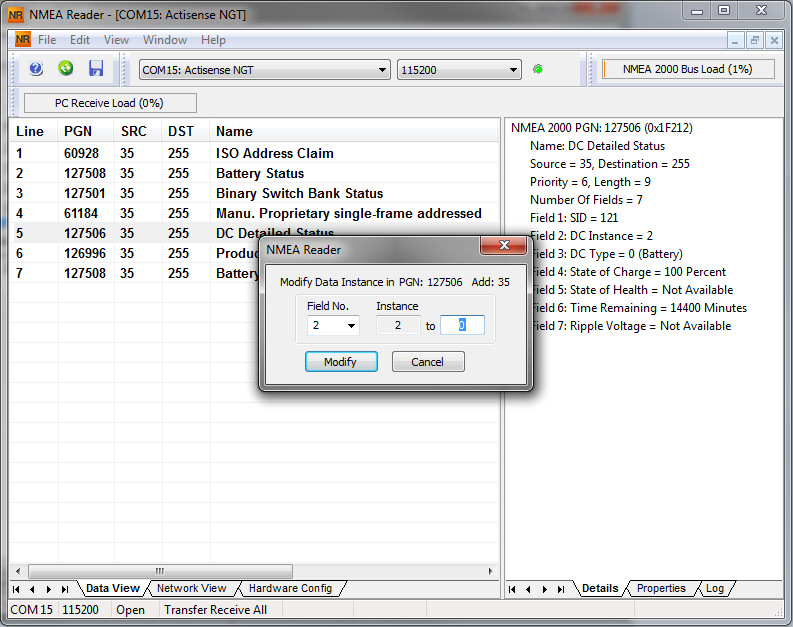
Modifiez la valeur (deuxième capture d’écran ci-dessous)
 |  |
Remarques :
L’instance de batterie et l’instance CC ont la même valeur dans les produits Victron. La modification de l’une d’entre elles entraînera la modification de l’autre.
Comme le BMV envoie deux tensions, la tension principale et la tension auxiliaire ou de démarrage, il est préconfiguré avec deux instances de batterie : 0 et 1. Si vous souhaitez les remplacer par 1 et 2, remplacez d’abord le 1 par le 2, puis le 0 par le 1, car elles ne peuvent pas être identiques.
La modification de l’instance de niveau de liquide à l’aide d’Actisense présente un bug. Cela est probablement dû au fait qu’Actisense considère qu’il s’agit d’un nombre de 8 bits, alors que dans la définition, il s’agit d’un nombre de 4 bits. Solution : à l’aide du dispositif GX, réglez le type de liquide sur Carburant (0), puis à l’aide d’Actisense, changez l’instance de liquide à la valeur souhaitée, puis à l’aide de votre GX, réglez à nouveau le type à la valeur souhaitée.
Maretron N2KAnalyzer :
Maretron utilise un terme appelé « instance unique » qui permet au logiciel N2KAnalyzer de déterminer automatiquement si un périphérique particulier utilise des instances de périphérique ou de données.
Avertissement
ATTENTION : Chez Victron, nous ne comprenons pas le fonctionnement du logiciel Maretron à cet égard. Nous vous conseillons d’utiliser un autre outil que celui de Maretron, afin de savoir ce que vous faites, c’est-à-dire de savoir quelle instance vous modifiez. Jusqu’à présent, nous n’avons pas pu utiliser le logiciel Maretron pour modifier une instance de données. La modification de l’autre instance, l’instance de périphérique, peut également être effectuée directement à partir de l’interface utilisateur du dispositif GX Victron. Pour modifier une instance de données, par exemple pour résoudre des conflits d’instance signalés par le logiciel Maretron, nous vous recommandons d’utiliser Actisense. Pas Maretron.
Modification des instances à partir de la ligne de commande du dispositif GX :
Au lieu d’utiliser Actisense ou le logiciel Maretron, il est également possible de modifier l’instance de périphérique VE.Can ou N2K à partir du shell du dispositif GX. Pour obtenir l’accès root, suivez les instructions suivantes : Venus OS : Accès root.
Une fois connecté au shell, suivez les instructions ci-dessous. Pour plus d’informations sur les commandes utilisées, telles que dbus et dbus-spy, lisez le document sur l’accès root.
Avertissement
ATTENTION : Mieux vaut utiliser un Actisense !
La procédure décrite dans les paragraphes suivants n’est normalement pas recommandée. Utilisez plutôt un Actisense, voir la méthode Actisense décrite plus haut.
Nouvelle méthode - modification d’une instance de périphérique :
Tous les périphériques disponibles sur le CAN-bus figurent sous le service com.victronenergy.vecan. Et pour tous les périphériques qui prennent en charge les commandes CAN-bus nécessaires, l’instance de périphérique peut être modifiée. Tous les produits Victron permettent de modifier leur instance de périphérique, ainsi que la plupart ou la totalité des produits non Victron.
# dbus -y com.victronenergy.vecan.can0 / GetValue
value = {
'Devices/00002CC001F4/DeviceInstance': 0,
'Devices/00002CC001F4/FirmwareVersion': 'v2.73',
'Devices/00002CC001F4/Manufacturer': 358,
'Devices/00002CC001F4/ModelName': 'Cerbo GX',
'Devices/00002CC001F4/N2kUniqueNumber': 500,
'Devices/00002CC001F4/Nad': 149,
'Devices/00002CC001F4/Serial': '0000500',
'Devices/00002CC005EA/CustomName': 'Hub-1',
'Devices/00002CC005EA/DeviceInstance': 0,
'Devices/00002CC005EA/FirmwareVersion': 'v2.60-beta-29',
'Devices/00002CC005EA/Manufacturer': 358,
'Devices/00002CC005EA/ModelName': 'Color Control GX',
'Devices/00002CC005EA/N2kUniqueNumber': 1514,
'Devices/00002CC005EA/Nad': 11,
'Devices/00002CC005EA/Serial': '0001514',
'Devices/00002CC005EB/CustomName': 'SmartBMV',
[and so forth]Pour les modifier, faites un appel SetValue au chemin DeviceInstance comme ci-dessous. Ou, plus simplement, utilisez l’outil dbus-spy.
Ces lignes lisent l’instance, la changent en 1, puis la lisent à nouveau :
root@ccgx:~# dbus -y com.victronenergy.vecan.can0 /Devices/00002CC005EB/DeviceInstance GetValue value = 0 root@ccgx:~# dbus -y com.victronenergy.vecan.can0 /Devices/00002CC005EB/DeviceInstance SetValue %1 retval = 0 root@ccgx:~# dbus -y com.victronenergy.vecan.can0 /Devices/00002CC005EB/DeviceInstance GetValue value = 1 [note that numbers, like can0, and 00002CC005EB can ofcourse be different on your system].
Nouvelle méthode - modification d’une instance de données :
Ceci ne s’applique qu’à la fonction NMEA2000-out.
Les instances de données utilisées pour la fonction NMEA2000-out sont stockées dans les paramètres locaux. Voici un extrait des lignes, pris en utilisant l’outil dbus-spy qui permet également de modifier les entrées (les instances de données sont les instances « Batterie » « CC détaillée », etc.) :
Settings/Vecan/can0/Forward/battery/256/BatteryInstance0 0 <- Data instance for main voltage measurement Settings/Vecan/can0/Forward/battery/256/BatteryInstance1 1 <- Data instance for starter or mid-voltage measurement Settings/Vecan/can0/Forward/battery/256/Description2 Settings/Vecan/can0/Forward/battery/256/IdentityNumber 15 Settings/Vecan/can0/Forward/battery/256/Instance 1 Settings/Vecan/can0/Forward/battery/256/Nad 233 <- Source address - no need, also not good, to change this Settings/Vecan/can0/Forward/battery/256/SwitchInstance1 0 <- Data instance for switchbank Settings/Vecan/can0/Forward/battery/256/SystemInstance 0 Settings/Vecan/can0/Forward/solarcharger/0/DcDataInstance0 0 Settings/Vecan/can0/Forward/solarcharger/0/DcDataInstance1 1 Settings/Vecan/can0/Forward/solarcharger/0/Description2 Settings/Vecan/can0/Forward/solarcharger/0/IdentityNumber 25 Settings/Vecan/can0/Forward/solarcharger/0/Instance 0 Settings/Vecan/can0/Forward/solarcharger/0/Nad 36 Settings/Vecan/can0/Forward/solarcharger/0/SystemInsta 0 Settings/Vecan/can0/Forward/solarcharger/1/DcDataInstance0 0 <- Battery voltage & current Settings/Vecan/can0/Forward/solarcharger/1/DcDataInstance1 1 <- PV voltage & current Settings/Vecan/can0/Forward/solarcharger/1/Description2 Settings/Vecan/can0/Forward/solarcharger/1/IdentityNumber 24 Settings/Vecan/can0/Forward/solarcharger/1/Instance 0 Settings/Vecan/can0/Forward/solarcharger/1/Nad 36 Settings/Vecan/can0/Forward/solarcharger/1/SystemInstance 0 Settings/Vecan/can0/Forward/solarcharger/258/DcDataInstance0 0 Settings/Vecan/can0/Forward/solarcharger/258/DcDataInstance1 1 Settings/Vecan/can0/Forward/solarcharger/258/Description2 Settings/Vecan/can0/Forward/solarcharger/258/IdentityNumber 23 Settings/Vecan/can0/Forward/solarcharger/258/Instance 0 Settings/Vecan/can0/Forward/solarcharger/258/Nad 36 Settings/Vecan/can0/Forward/solarcharger/258/SystemInstance 0
Ancienne méthode :
Listez les périphériques :
root@ccgx:~# dbus -y com.victronenergy.bms.socketcan_can0_di0_uc10 com.victronenergy.charger.socketcan_can0_di1_uc12983
Modifiez l’instance, par exemple en 4 :
root@ccgx:~# dbus -y com.victronenergy.charger.socketcan_can0_di0_uc12983 /DeviceInstance SetValue %4 retval = 0
Attendez quelques secondes, puis vérifiez à nouveau :
root@ccgx:~# dbus -y com.victronenergy.bms.socketcan_can0_di0_uc10 com.victronenergy.charger.socketcan_can0_di4_uc12983
L’instance de périphérique a été modifiée avec succès !
14.8.6. PGN 60928 NAME Numéros d’identification uniques
Le dispositif GX attribue un numéro d’identification unique à chaque périphérique virtuel. Le numéro attribué est une fonction de PGN 60928 NAME Numéro d’identification unique, ou Numéro unique de l’appareil pour VE.Can, tel que configuré dans les paramètres du dispositif GX.
Ce tableau montre comment la modification de ce paramètre se traduit dans la mise à disposition des appareils virtuels sur le CAN-bus :
Bloc d’identification unique configuré : | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
Dispositif GX | 500 | 1000 | 1500 | 2000 |
1er périphérique virtuel (par exemple un BMV) | 501 | 1001 | 1501 | 2001 |
2e périphérique virtuel (par exemple un autre BMV) | 502 | 1002 | 1502 | 2002 |
3e périphérique virtuel (par exemple un troisième BMV) | 503 | 1003 | 1503 | 2003 |